

步進馬達PKP系列 CVD系列RS-485通訊型驅動器
2021.2.12
2相步進馬達PKP系列高解析度型追加安裝尺寸28㎜。
有助於節省空間的小型、輕量驅動器。2相與5相驅動器的尺寸、安裝、I/O連接器都相同。可配合客戶要求規格,自由選用、評估2相與5相。
● 2相驅動器與5相驅動器並非共用。而是各自專用的驅動器。
重量20g~70g
(因驅動器種類而異。)

配合設置方式,備有出力軸形狀、連接器方向不同的驅動器。
● 2相、5相皆有準備。
附安裝板水平式
連接器為橫向。

附安裝板
接器為朝上。


CVD系列與舊有產品相比增加輸出電流,實現高轉矩化。為能增加輸出電流,採用了顧慮到可減低發熱量的設計。

藉由驅動回路高效率化達成高電流的CVD系列驅動器與重新檢視馬達線圈設計PKP系列組合,實現高轉矩化。
低速領域高轉矩化
提高了2相馬達的激磁最大靜止轉矩。
特別是250r/min左右的轉矩較舊有產品提高了50%。

全速度領域高轉矩化
將5相馬達的性能提高至極限,在全速度領域大幅提升轉矩,擴大使用範圍。

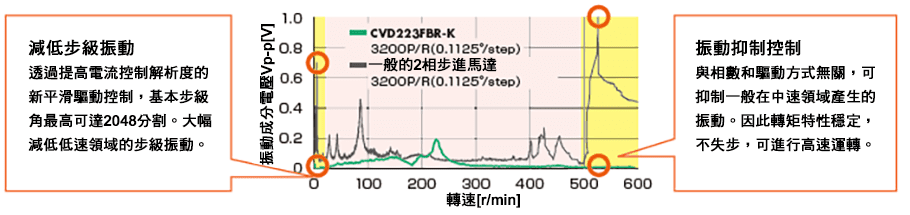
透過全數位控制的微步級驅動,大幅改善振動等級,在全速度領域實現低振動化。
全速度領域內的振動特性皆大幅改善

更進一步降低振動

CVD系列為全數位控制的驅動器。將電流控制數位化,採用高性能CPU展開計算處置。流於各相的電流從原來的梯形波狀變成正弦波狀,透過於全速度範圍中執行微步級驅動,更進一步實現低振動化。
數位電流控制器構造

馬達電流波形示意圖

採微步級驅動,最多能將解析度提高至125000P/R。與全步級驅動時相較,一般來說微步級驅動時的停止精度較差,特別是2相步進馬達最為明顯。
此時,若採用CVD系列5相步進馬達用驅動器,即可進行更高精度的定位。
一般的2相驅動器+2相馬達時
若使用一般的2相用驅動器實施微步級驅動,
會因為轉矩漣波導致停止精度變差。

5相驅動器CVD系列+5相PKP系列時
即使為微步級驅動,停止精度也不會惡化。

2相步進馬達大幅提升低速領域的轉矩,而5相步進馬達則主要大幅提升高速領域的轉矩。可從廣泛的速度、轉矩領域中,選用符合需求規格的馬達。

需要緊急加減速的用途,建議使用低速時轉矩較高的2相步進馬達。

低速領域高轉矩

需要長定位的用途,建議使用高速轉矩較高的5相步進馬達。

高速領域高轉矩

需要將大的慣性急速加減速的用途,建議2相步進馬達的減速機型馬達。

轉速-轉矩特性比較

● 備有更強力的5相步進馬達RKⅡ系列(AC電源輸入型)。
PKP系列相較於舊有產品,實現了「小型化」、「高轉矩化」的基本性能提升。另外,充實產品種類,比方說有馬達長度特別短的產品「薄型設計」或耐摩擦負載的馬達「高解析度型」等等,因應組裝到客戶端有各種限制條件的設備內。
PKP系列的產品種類一覽表
| 種類 | 示意圖 | 基本步級 角度[°] |
概要 |
|---|---|---|---|
| 標準型 |  |
2相:1.8 5相:0.72 |
容易使用的基本型。 部份產品採用小型、薄型連接器,連接器部的突出降低。也因馬達電纜線的出線方向朝上,配線自由度相對提高。 |
| 標準型 附編碼器 |
 |
2相:1.8 5相:0.72 |
使用附編碼器馬達,即可監視現在位置並檢知位置差距等。有助於更進一步提升設備的穩定性。 |
| 高解析度型 |  |
2相:0.9 5相:0.36 |
馬達基本解析度為標準型2倍的產品。 相對於負載轉矩的變形位移角變小,可得到高定位精度。同時也減低振動。 |
| 高解析度型 附編碼器 (僅限2相馬達) |
 |
0.9 | 高解析度型另有附編碼器機種。 |
| 薄型設計 (僅限2相馬達) |
 |
1.8 | 馬達厚度控制在17mm的薄型機型。由於馬達薄型化,可安裝於狹窄空間內,以縮小設備體積、減輕重量。 |
| 薄型設計 附諧和式減速機 (僅限2相馬達) |
 |
0.018~0.036 | 薄型機型中亦有搭載高精度諧和式減速機的機型。實現小型但高轉矩、高解析度。 |
| SH減速機型 (僅限2相馬達) |
 |
0.05~0.5 | 能有效減速、提高轉矩、提高解析度並減低振動。與舊有產品相較,齒隙變小。 |
| SH減速機型 附編碼器 (僅限2相馬達) |
 |
0.05~0.5 | SH減速機型另有附編碼器機種。 |
| CS減速機型 (僅限2相馬達) |
 |
0.09~0.36 | 重新檢視減速機構造實現中心軸。能有效減速、提高轉矩、提高解析度並減低振動。 |
| TS減速機型 (僅限5相馬達) |
 |
0.024~0.2 | 能有效減速、提高轉矩、提高解析度並減低振動。使用瞬間最大轉矩領域,可縮短定位時間。 |
希望以Modbus(RTU)控制運作。希望以人機介面簡單設定資料。本驅動器可因應這類需求。

● 在RS-485通訊中,可進行運轉資料和參數設定、運轉指令的輸入。
● 網路通訊協定對應Modbus(RTU),可利用PLC等輕鬆進行控制。
● 上位控制機器1台最多能夠連接31軸。(總延長距離:10m以下)
● 可設定及選擇運轉資料、參數,執行定位運轉。 (運轉資料設定數:256)
● 支援由RS-485通訊每次寫入位置、速度的直接資料運轉。
希望從PC運作
由安裝影像檢查軟體的PC透過RS-485通訊控制馬達

希望從人機介面運作
人機介面除了X‐Y‐Z軸,還可控制終端效應器

希望切換開關運作
人機介面除了X‐Y‐Z軸,還可控制終端效應器

簡單設定
資料設定軟體MEXE02(免費下載)
可由電腦簡單進行運轉資料的編輯和參數設定等基本設定。
此外,可進行程序控制,因此無需上位程序即可構成簡易的系統。資料設定軟體可至本公司網站下載。

可從電腦畫面進行示教型。

亦有搭載可確認信號輸入狀況的波形監視器。

搭載有助於「可視化」的監視功能。
| CVD系列 RS-485通訊 |
||
|---|---|---|
| 監視 | 位置 | ○※ |
| 速度 | ○※ | |
| 驅動器溫度 | ○ | |
| 行走距離 累積行走距離 |
○ | |
| Information | 驅動器過熱 | ○ |
| 行走距離 累積行走距離 |
○ | |
| Alarm | 驅動器過熱 | ○ |
※ 僅能監視指令值。
RS-485通訊型可將運轉資料設定在驅動器中,從上位選擇並執行運轉資料。還可結合運轉資料。
運轉模式
● 定位SD運轉

將馬達的轉速或位置(移動量)等設定在運轉資料中,而從現在位置朝向目標位置進行梯形驅動。
● 自動連結運轉

依序執行2個以上的運轉。1個運轉結束後,停止經過「運轉結束延遲」中所設的時間之後,開始執行「下一連結資料」所設的運轉資料之運轉。如有途中設定「無結合」的運轉資料,則執行定位SD運轉至該運轉資料,停止馬達。
● JOG運轉

輸入信號ON期間,馬達朝單方向進行連續運轉。若將輸入信號設定為OFF則馬達減速停止。
● 連續運轉

輸入信號ON期間,馬達朝單方向進行連續運轉。在連續運轉中,若變更運轉資料No.,將會變速。若將輸入信號設定為OFF則馬達會減速停止。
輸出信號
● AREA輸出

馬達的位置位依照各運轉資料設定的區域的範圍內時,AREA輸出會變成ON。詳細設定請確認使用說明書的「AREA範圍指定方法」。
介紹RS-485通訊型的輸出入信號(節錄)。
| 信號名稱 | 功能 | |
|---|---|---|
| 輸入信號 | AWO | 阻隔馬達的電流使其無激磁。(ON無激磁) |
| STOP | 使馬達停止。 | |
| ALM-RST | 解除發生中的Alarm。 | |
| P-PRESET | 執行位置預設。 | |
| FW-BLK | 停止FWD方向的運轉。 | |
| RV-BLK | 停止RVS方向的運轉。 | |
| FW-LS | 輸入FWD方向極限檢知器(外部檢知器)。 | |
| RV-LS | 輸入RVS方向極限檢知器(外部檢知器)。 | |
| HOMES | 輸入機械原點檢知器(外部檢知器)。 | |
| SLIT | 輸入縫隙檢知器(外部檢知器)。 | |
| START | 執行定位SD運轉。 | |
| SSTART | 執行定位SD運轉。手動連結運轉時,執行下一連結資料的運轉。 | |
| HOME | 執行原點復歸運轉。 | |
| FW-JOG | 執行FWD方向的JOG運轉。 | |
| RV-JOG | 執行RVS方向的JOG運轉。 | |
| FW-POS | 執行FWD方向的連續運轉。 | |
| RV-POS | 執行RVS方向的連續運轉。 | |
| M0~M7 | 使用8個bit,選擇運轉資料No.。 | |
| R0~R7 | 通用信號。 | |
| 輸出信號 | CONST-OFF | 不使用輸出功能。 |
| ALM-A | 輸出驅動器的Alarm狀態(常開接點)。 | |
| ALM-B | 輸出驅動器的Alarm狀態(B接點)。 | |
| READY | 於驅動器運轉準備完成時輸出。 | |
| MOVE | 馬達正在動作時輸出。 | |
| VA | 轉速達到目標速度時輸出。(指令速度標準) | |
| CRNT | 馬達激磁時輸出。 | |
| AUTO-CD | 自動電流下降狀態時輸出。 | |
| HOME-END | 原點復歸運轉結束時,及執行位置預設時輸出。 | |
| ABSPEN | 座標確定時輸出。 | |
| PLS-OUT | 馬達出力軸每運轉1圈則輸出50脈波。 | |
| FW-SLS | 到達FWD方向的軟體極限時輸出。 | |
| RV-SLS | 到達RVS方向的軟體極限時輸出。 | |
| TIM | 馬達出力軸從原點每運轉7.2°時輸出。 | |
| AREA0 | 馬達位於區域內時輸出。(以指令位置為基準) | |
| AREA1 | 馬達位於區域內時輸出。(以指令位置為基準) | |
| SEQ-BSY | 執行定位SD運轉時輸出。 | |
| DELAY-BSY | 驅動器成為待機狀態(運轉結束延遲、Dwell)時輸出。 | |
| DCMD-RDY | 直接資料運轉準備完成時輸出。 | |
| INFO-DRVTMP | 滿足「驅動器溫度Information」設定的條件時輸出。 | |
| INFO-OVOLT | 滿足「過電壓Information」設定的條件時輸出。 | |
| INFO-UVOLT | 滿足「電壓不足Information」設定的條件時輸出。 | |
| INFO-START | 發生「運轉起動失敗」時輸出。 | |
| INFO-PR-REQ | 在位置預設或原點復歸運轉下執行預設時輸出。 | |
| INFO-MSET-E | 發生「馬達設定異常」時輸出。 | |
| INFO-NET-E | 發生「RS-485通訊異常」時輸出。 | |
| INFO-FW-OT | 發生「正轉方向運轉禁止」時輸出。 | |
| INFO-RV-OT | 發生「逆轉方向運轉禁止」時輸出。 | |
| INFO-TRIP | 馬達出力軸的總運轉量(以指令位置為基準)滿足「TRIP Information」設定的條件時輸出。 | |
| INFO-ODO | 馬達出力軸的累計運轉量(以指令位置為基準)滿足「ODO Information」設定的條件時輸出。 | |
| INFO-DSLMTD | 發生「限制運轉起動模式」時輸出。 | |
| INFO-IOTEST | 發生「I/O測試模式」時輸出。 | |
| INFO-CFG | 發生「要求Configuration」時輸出。 | |
| INFO-RBT | 發生「要求重新起動」時輸出。 |


